
در این مقاله با VFD (درایو فرکانس متغیر) و کاربردهای آن آشنا میشویم. همچنین مبدل و باس جریان مستقیم را به طور مفصل پوشش خواهیم داد. در نهایت، ماژول IGBT و اینکه چگونه PWM (مدولاسیون پهنای پالس) اجازه خروجی متناوب به موتور برای کنترل دقیق سرعت موتور میدهد را بررسی خواهیم نمود.
سرعت چرخش موتورهای AC
سرعت چرخش موتورهای القایی یا جریان متناوب وابسته به تعداد قطبهای داخل خود موتور و فرکانس توان منبع تغذیه میباشد.
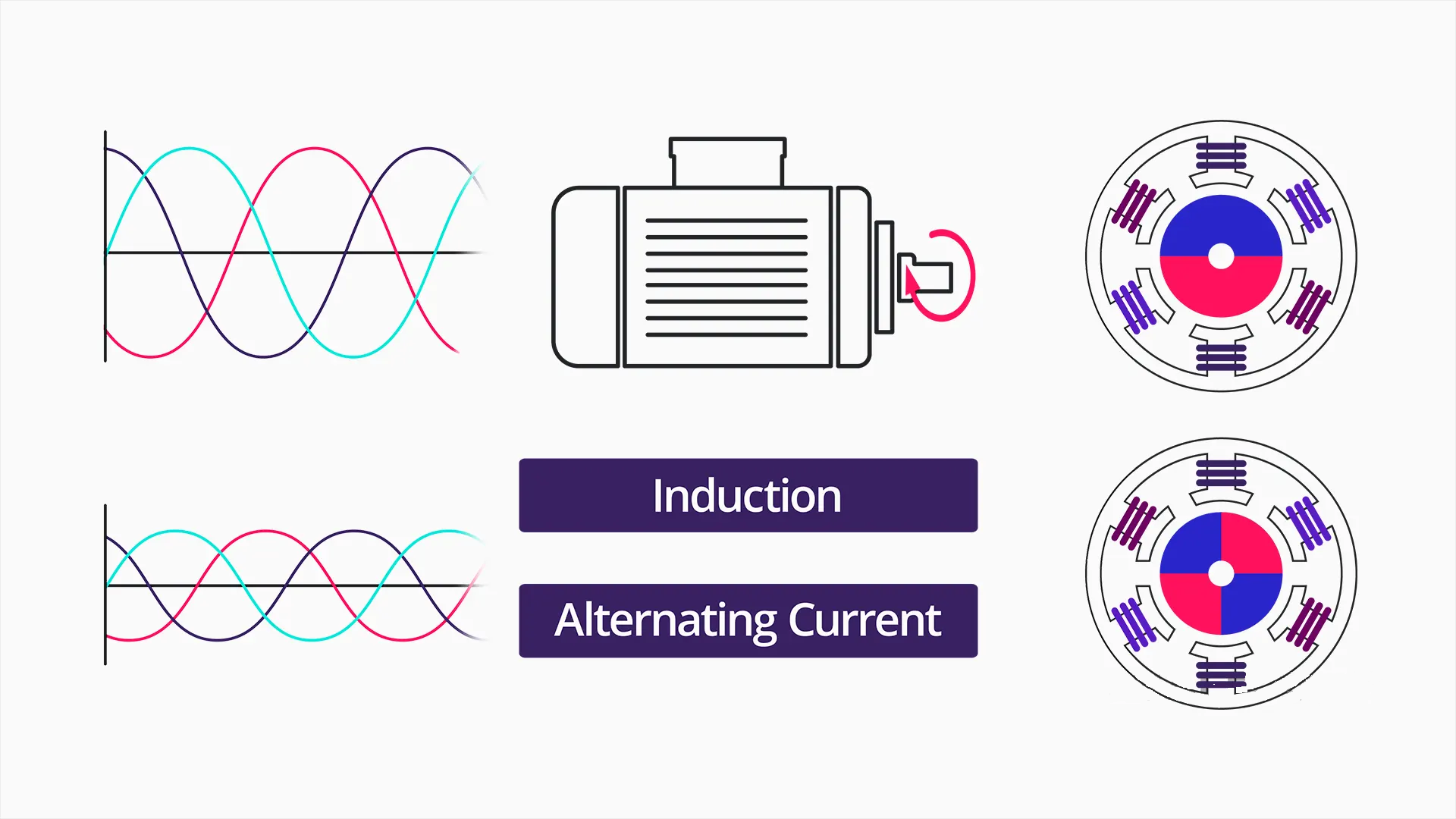
شکل 1: رفتار موتور القایی
فرکانس (اندازهگیری شده بر حسب هرتز) ارتباط مستقیمی با دور بر دقیقه (RPM) موتور یا همان سرعت چرخش موتور دارد. هرچه فرکانس بیشتر باشد، سرعت چرخش موتور بیشتر میشود. در ایالات متحده، برق متناوب با فرکانس 60 هرتز ارائه میگردد. یک موتور AC دارای دو قطب که در این فرکانس کار میکند، سرعت چرخش آن 3600RPM خواهد بود.
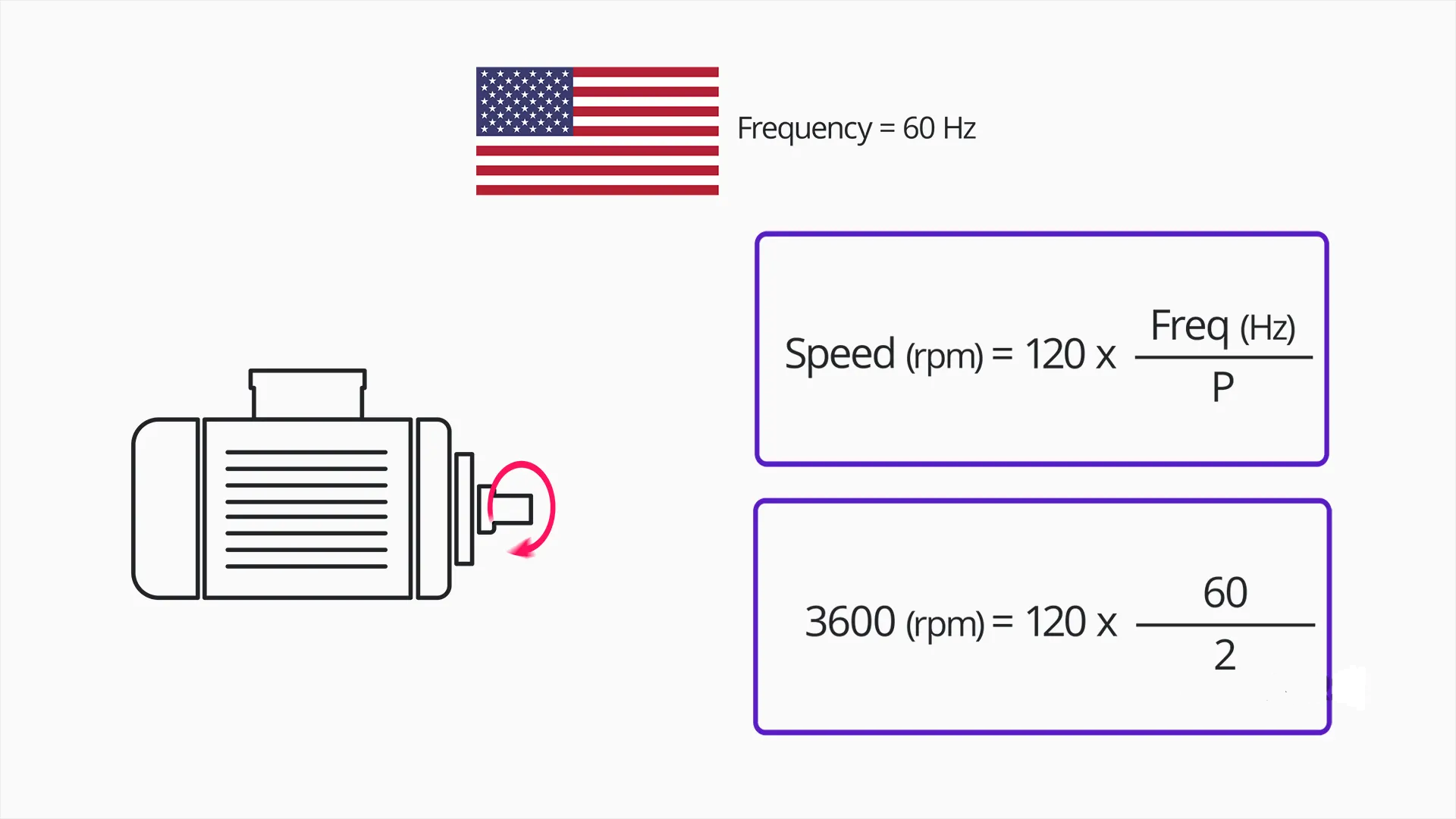 شکل 2: وابستگی سرعت موتور به تعداد قطب و فرکانس
شکل 2: وابستگی سرعت موتور به تعداد قطب و فرکانس
در برخی از کاربردهای موتورهای الکتریکی نیازی به سرعت کامل (در مثال قبل 3600RPM) نیست، که در این حالت چند راهحل وجود دارد:
1. استفاده از کاهندههای سرعت مکانیکی
به طور مکانیکی با استفاده از جعبه دنده (gear box) سرعت و گشتاور خروجی را به ترتیب کاهش و افزایش میدهند. همانطور که در شکل نشان داده شده، دنده خروجی دندانههای بیشتری نسبت به دنده ورودی دارد.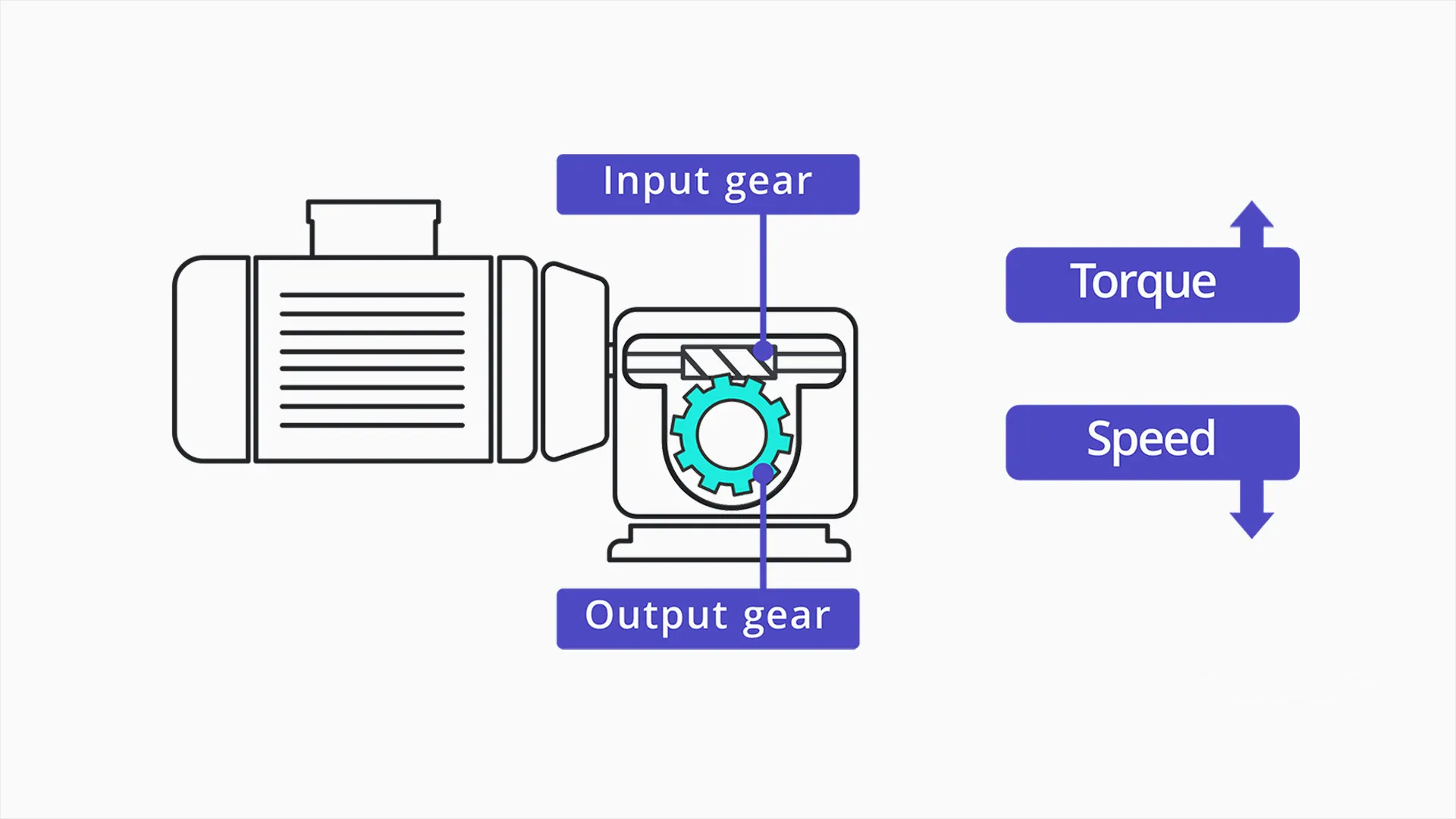 شکل 3: کاهنده سرعت مکانیکی موتورهای الکتریکی
شکل 3: کاهنده سرعت مکانیکی موتورهای الکتریکی
از معایب این روش میتوان نیاز به روغنکاری و نبود انعطاف نام برد. این روش برای شفتهای طویل نامناسب است. همچنین باید توجه داشت که در این روش با کاهش سرعت موتورهای الکتریکی، همواره دارای لرزش و سر و صدا خواهد بود.
2. اضافه کردن قطبهای دیگر به موتور الکتریکی
در روش کاهش سرعت مکانیکی، پارامترهای الکتریکی تغییر نمیکنند. در حال حاضر سیستمهای ترانزیستوری وجود دارند که میتوانند قطبهای داخلی موتورها را کم و زیاد کنند. در این حالت نیز با بالا رفتن تعداد قطبها سرعت چرخش نامی موتورهای الکتریکی کاهش پیدا میکند. در این حالت از طرفی پیچیدگی سیم پیچی موتورهای الکتریکی بیشتر شده و از طرف دیگر امکان انتخاب سرعت های دلخواه وجود ندارد.
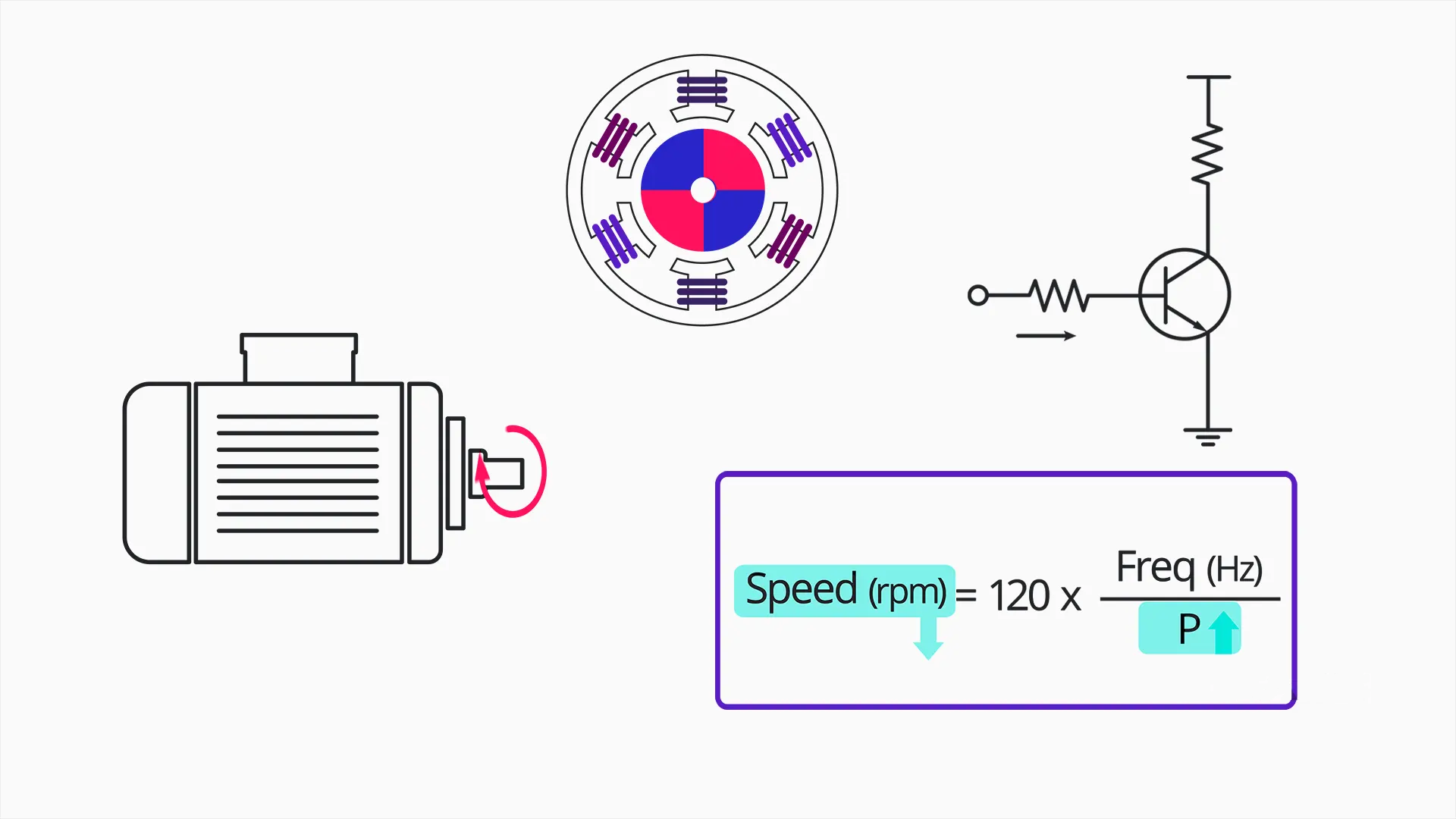
شکل 4: تاثیرات افزایش قطبهای موتور بر روی سرعت نامی
3. استفاده از VFD (درایو فرکانس متغیر)
به منظور دستیابی به یک افزایش سرعت یکنواخت موتور الکتریکی تا سرعت مورد دلخواه، لازم است که دو پارامتر ولتاژ و فرکانس تغییر کنند.
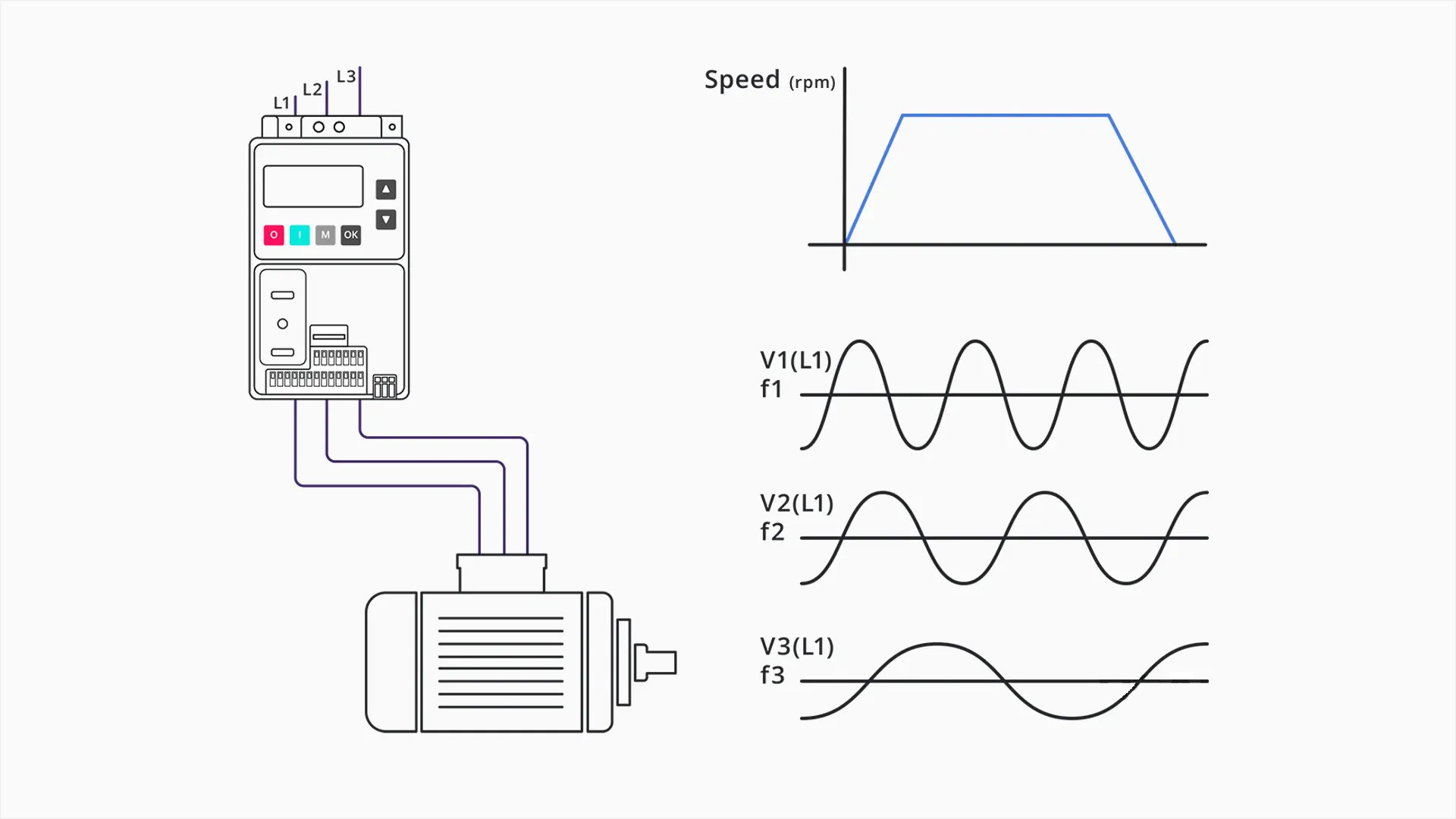
شکل 5: تاثیرات ولتاژ و فرکانس بر روی سرعت موتور
یکی از ویژگی های مهم درایو فرکانس متغیر این است که در صورت نیاز برای تغییر سرعت موتور در یک کاربرد خاص، درایو به سادگی میتواند سرعت موتور را افزایش یا کاهش دهد تا نیازهای عملیاتی جدید را برآورده کند. این در حالی است که این کار با استفاده از کاهندههای سرعت مکانیکی یا سیستمهای ترانزیستوری برای اضافه کردن قطبهای بیشتر، امکانپذیر نخواهد بود.
در ادامه در مورد کنترل سرعت موتورهای الکتریکی به روش VFD صحبت خواهد شد ولی اگر مایل به کسب اطلاعات بیشتر در مورد نحوه حفاظت موتورهای الکتریکی هستید، میتوانید مقاله "چگونه رله اضافه بار موتور را درست تنظیم کنیم؟" را مطالعه بفرمایید.
کاربرد درایو فرکانس متغیر یا VFD
استفاده از VFDها در بسیاری از کاربردهای صنعتی و تجاری گسترده است.
- در کاربردهای صنعتی، VFDها برای کنترل اکسترودرها، جرثقیلهای برقی، ترن هوایی، گاوهای مکانیکی (مورد استفاده در شهربازی) و موارد بسیار زیاد دیگری استفاده میشوند.
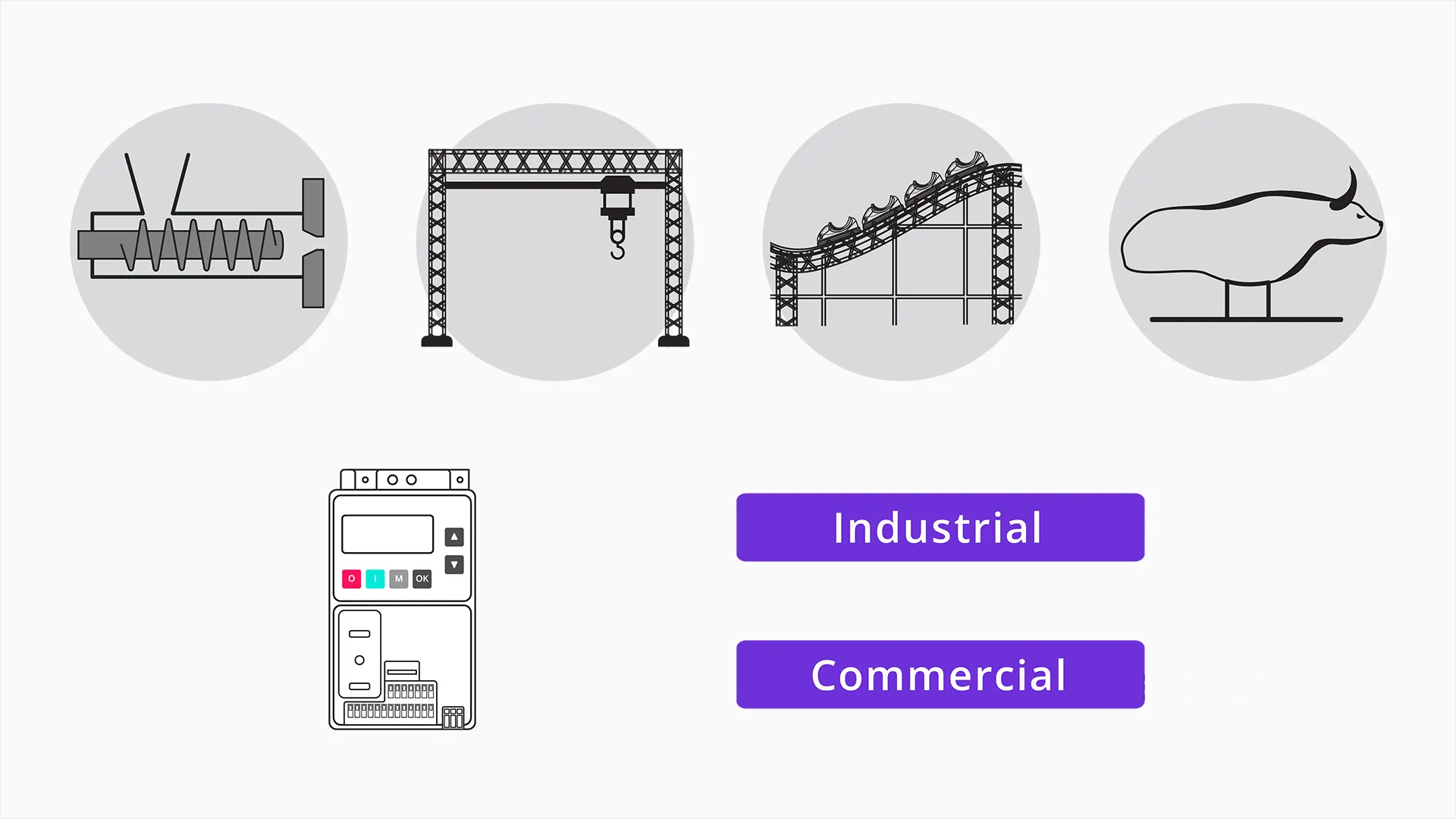 شکل 6: کاربردهای صنعتی VFD
شکل 6: کاربردهای صنعتی VFD
- در کاربردهای تجاری، VFDها به طور گسترده در پمپها برای کنترل جریان و حجم سیال در یک مخزن، و همچنین در صنعت HVAC استفاده میشوند که فناوری سبز نامیده میشود.
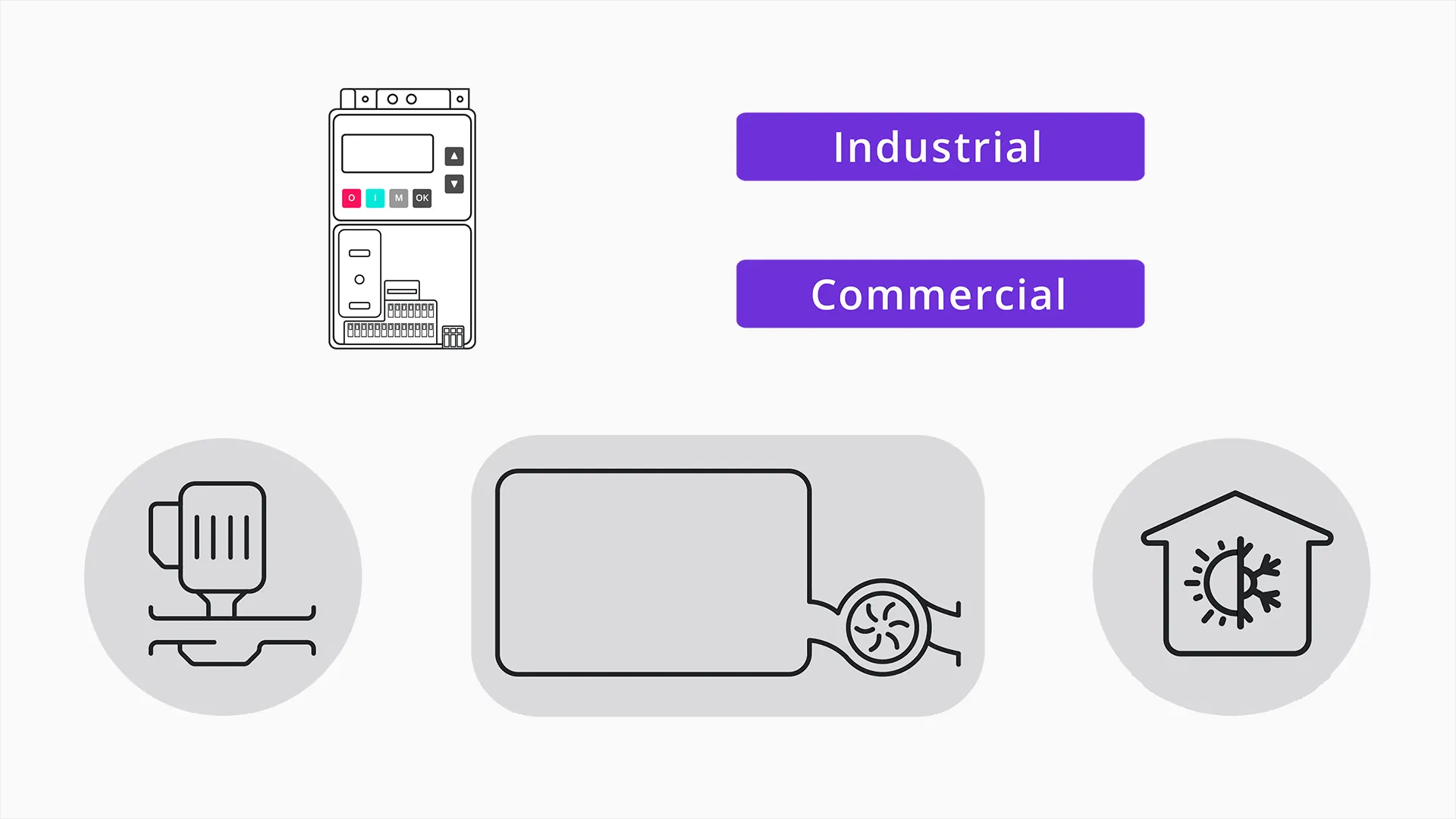
شکل 7: کاربردهای تجاری VFD
در نهایت، یک VFD فرکانس تغذیه موتور AC را تغییر میدهد تا سرعت آن را کنترل کند؛ و موتور به صورت نرم راه اندازی شود و در نهایت سرعت موتور را برای کاربرد مورد نیاز تغییر دهد.
اکنون که میدانیم چرا و کجا از VFDها استفاده می شود، بیایید به نحوه عملکرد یک VFD بپردازیم:
مدار الکتریکی VFD
شکل زیر دیاگرام یک VFD را نشان میدهد:
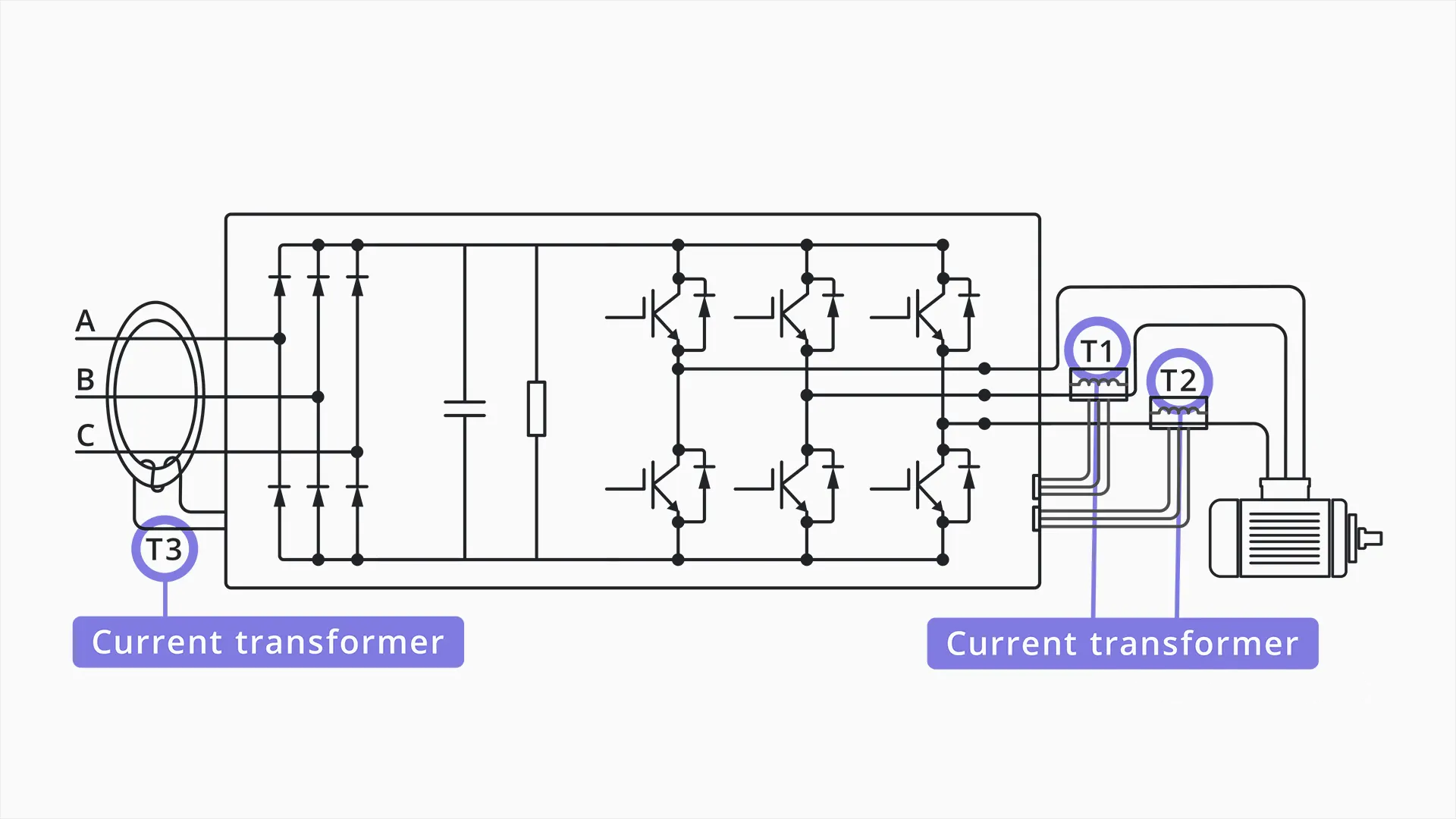
شکل 8: شماتیک مداری یک VFD
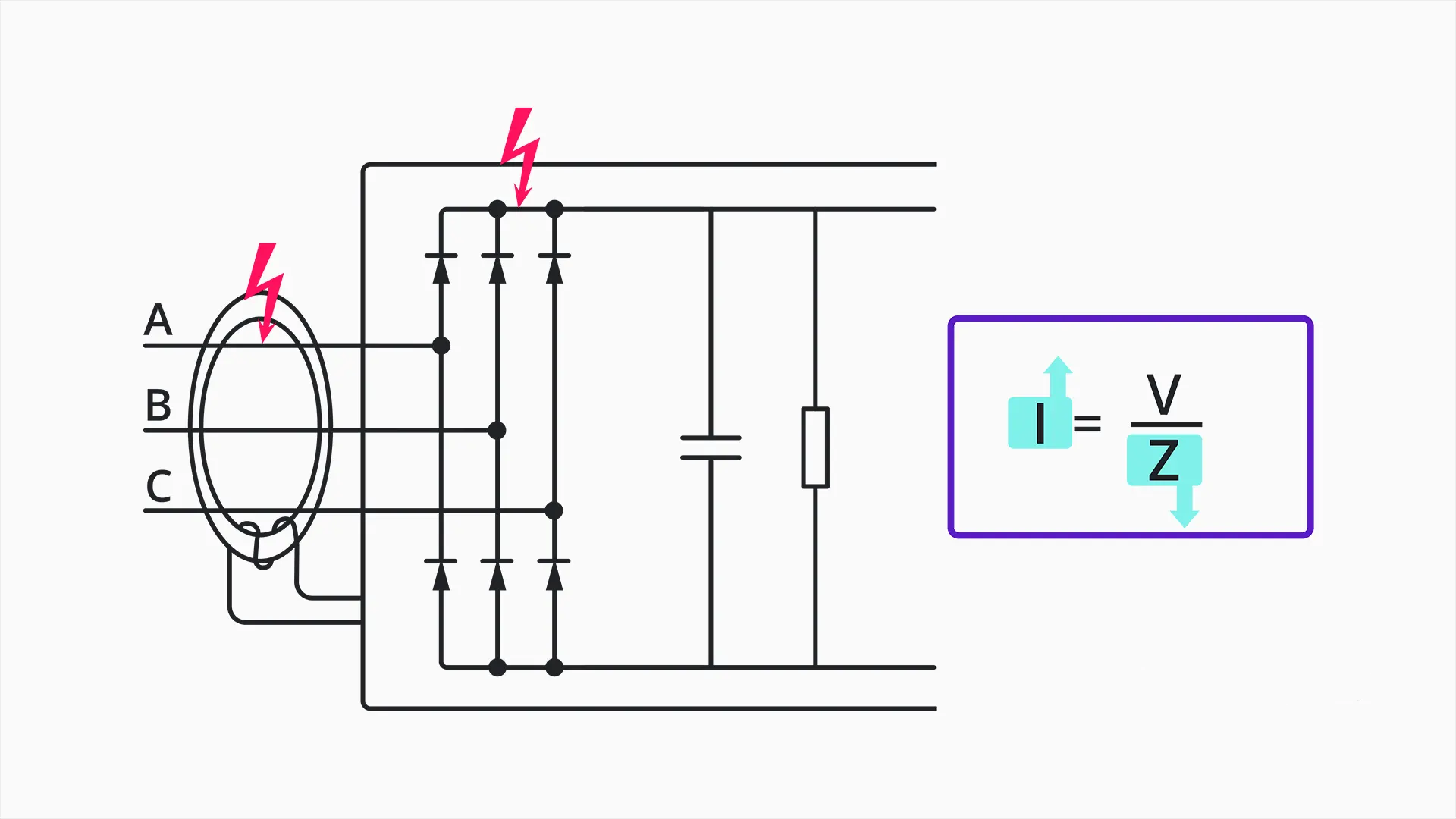
اولین چیزی که در مدار پیدا میکنیم یک ترانسفورماتور جریان (T3) است که وظیفه اندازهگیری جریان ورودی VFD را دارد، به طوری که کنترلرهای VFD میتوانند جریان ورودی و خروجی از VFD را (که توسط دو ترانسفورماتور جریان نشان داده شده با T1 و T2 اندازهگیری میشود) مقایسه کنند.
اگر اختلاف جریان اندازه گیری شده متفاوت باشد، VFD دچار خطای زمین شده است.
1. یکسوکننده یا مبدل شش پالس
در ادامه تحلیل دیاگرام VFD، مبدل (Converter) را داریم که یکسوکننده (Rectifier) نیز نامیده میشود. اگر بخواهیم مسئله را تشریح کنیم و به نمودار یکسوکننده نگاه کنیم، به این صورت خواهد بود:
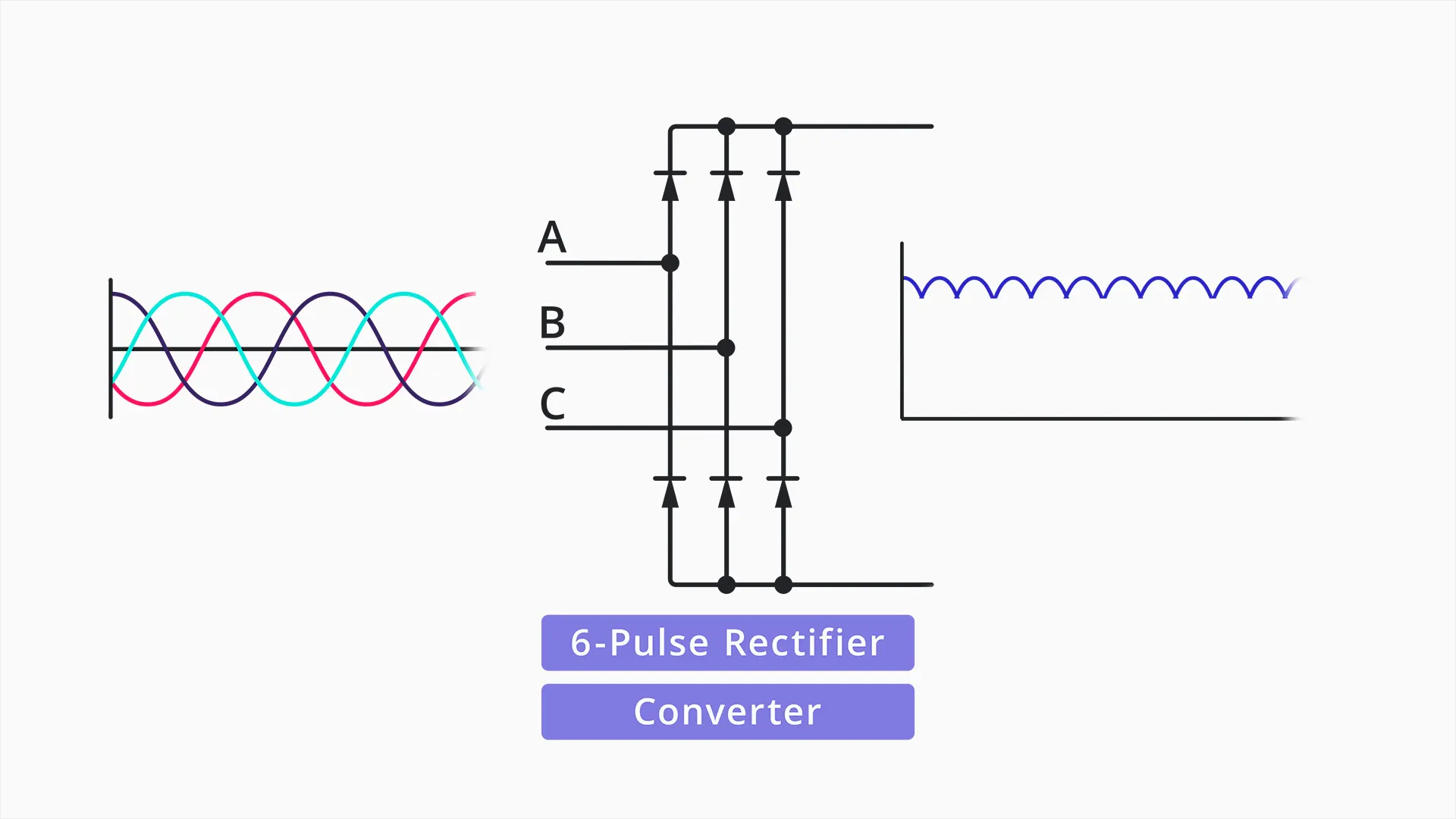
شکل 9: شماتیک مداری یکسو کننده
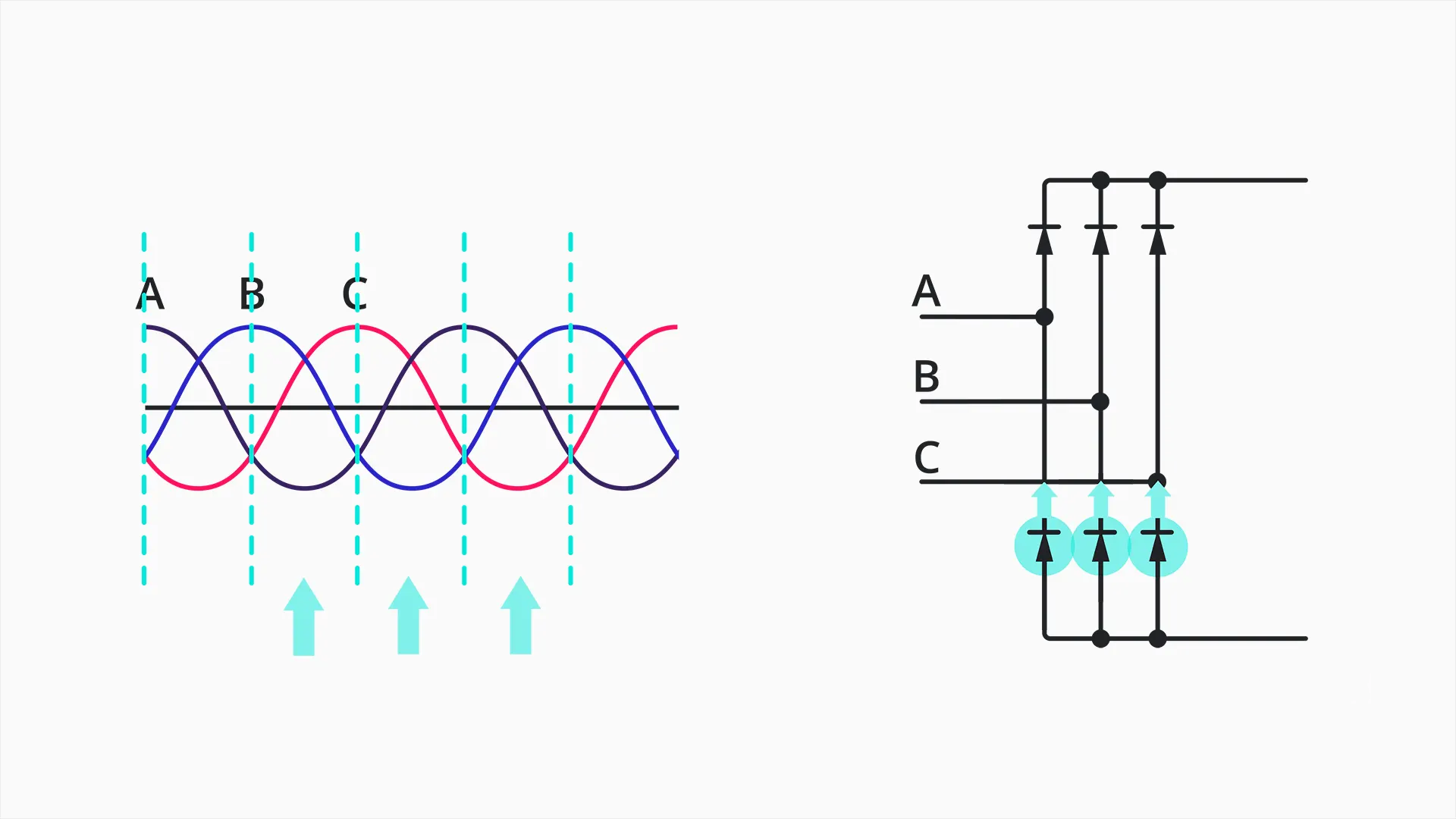
این یکسوکننده، مبدل شش پالس نامیده میشود که در آن جریان متناوب سه فاز با استفاده از دیودها به جریان مستقیم تبدیل میشود.
با استفاده از قیاس با یک سیستم هیدرولیک، آن شش دیود را میتوان معادل شیرهای یکطرفه (check valves) در نظر گرفت. این مقایسه در شکل زیر به خوبی نشان داده شده است.
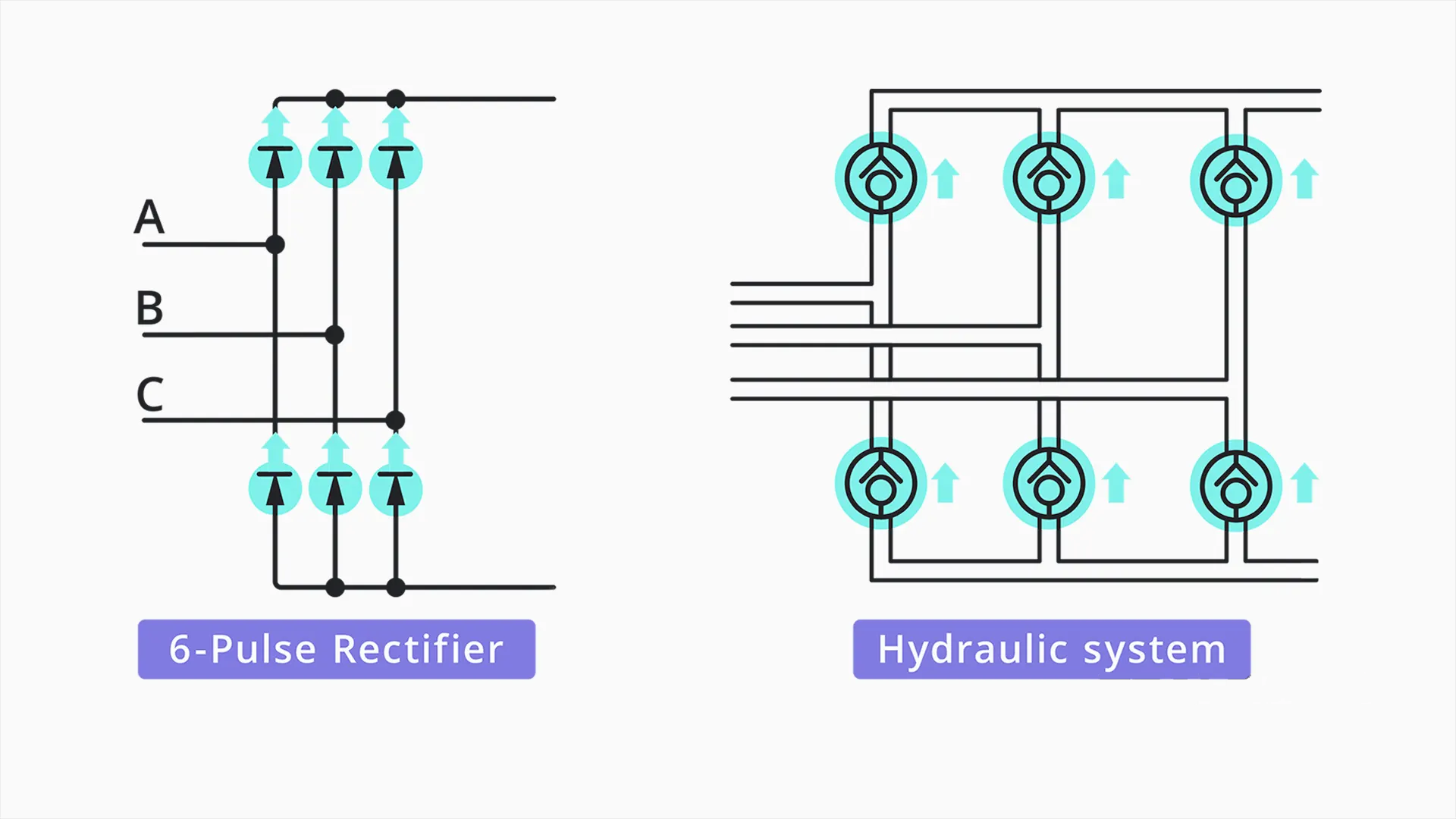
شکل 10: مقایسه مدار یکسو کننده با سیستم هیدرولیک
شیرهای یکطرفه فقط اجازه میدهند جریان در یک جهت جاری گردد، در دیودها هم جریان از یک جهت وارد میگردد (جهت جریان با فلش روی نماد دیود نشان داده میشود). جریان الکتریکی در جهت فلش روی نقشه دیود از دیود عبور میکند که در آن جریان از آند به کاتد میرود. این موارد در شکل زیر نشان داده شده است.
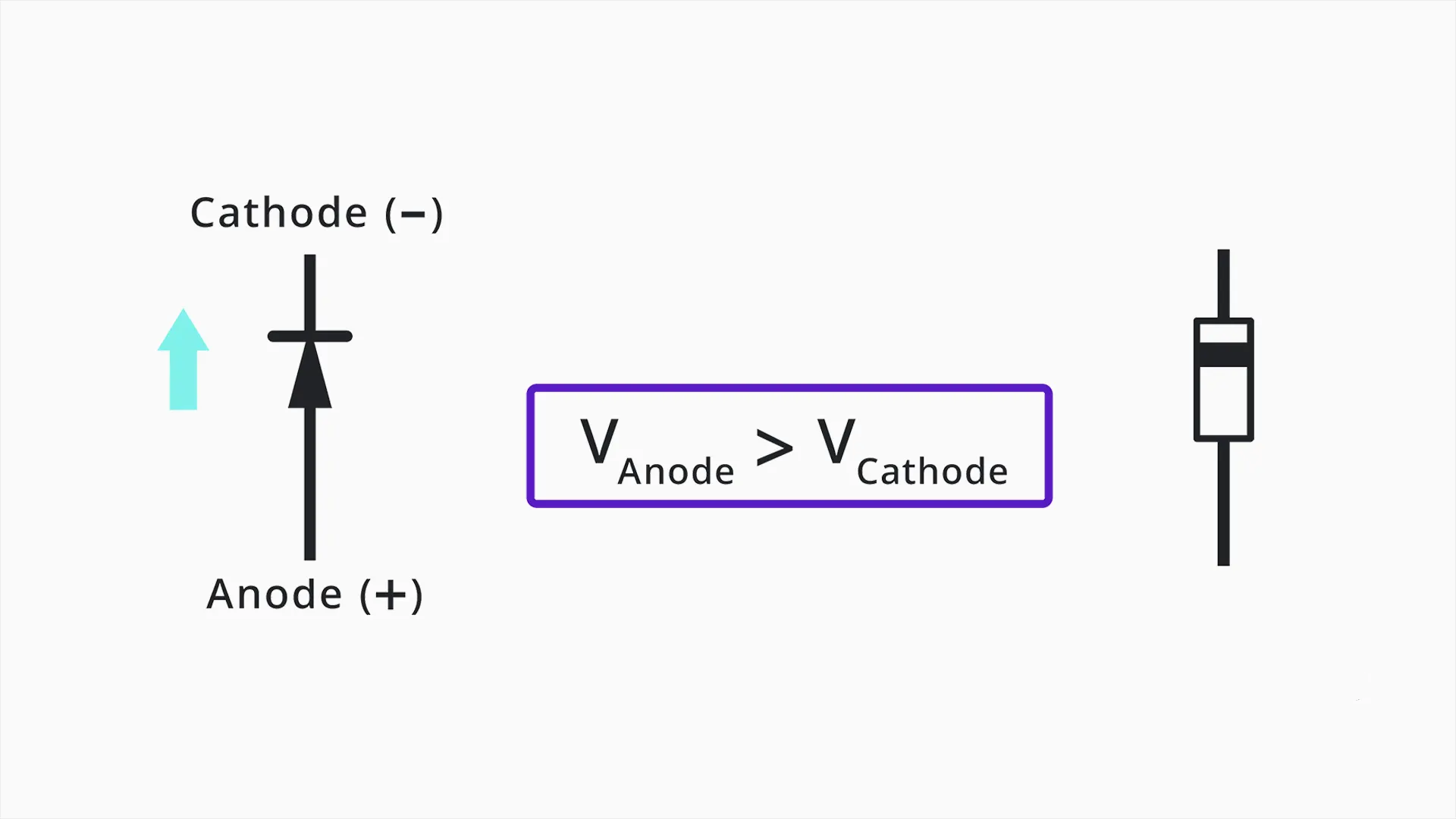
شکل 11: مقایسه دیود با شیر یکطرفه
با توجه به شکل تنها زمانی جریان الکتریکی وجود خواهد داشت که ولتاژ آند بیشتر از کاتد باشد. بنابراین، هنگامی که یک جریان متناوب سه فاز را به مبدل وصل میکنیم:
- وقتی ولتاژ فاز A بزرگتر از ولتاژ فازهای B یا C باشد، این دیود به جریان اجازه عبور میدهد.
- وقتی ولتاژ فاز B بزرگتر از ولتاژ فاز A شد، دیود فاز B است به جریان اجازه عبور میدهد این در حالی است که دیود فاز A به جریان اجازه عبور نمیدهد.
همین امر برای فاز C و همچنین برای سه دیود در سمت منفی باس هم صادق است.
شکل 12: رفتار مبدل در سمت منفی باس
شکل موج حاصل از نتایج مربوط به شش پالس جریان که سبب قطع و وصل دیودها میشود، به صورت زیر خواهد بود:
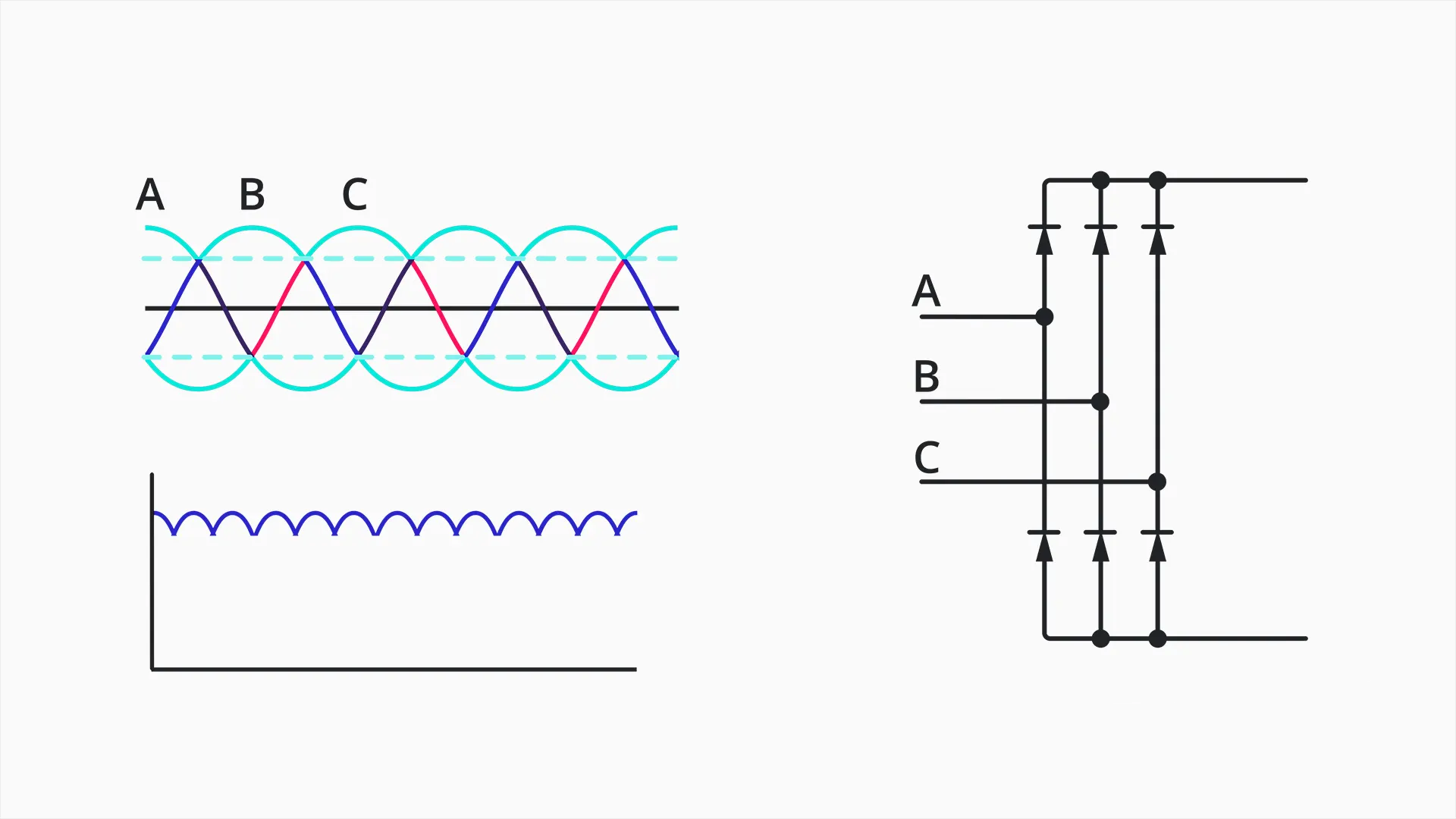
شکل 13: نتایج مربوط به شش پالس جریان
2. باس جریان مستقیم (DC) یا فیلتر و بافر DC
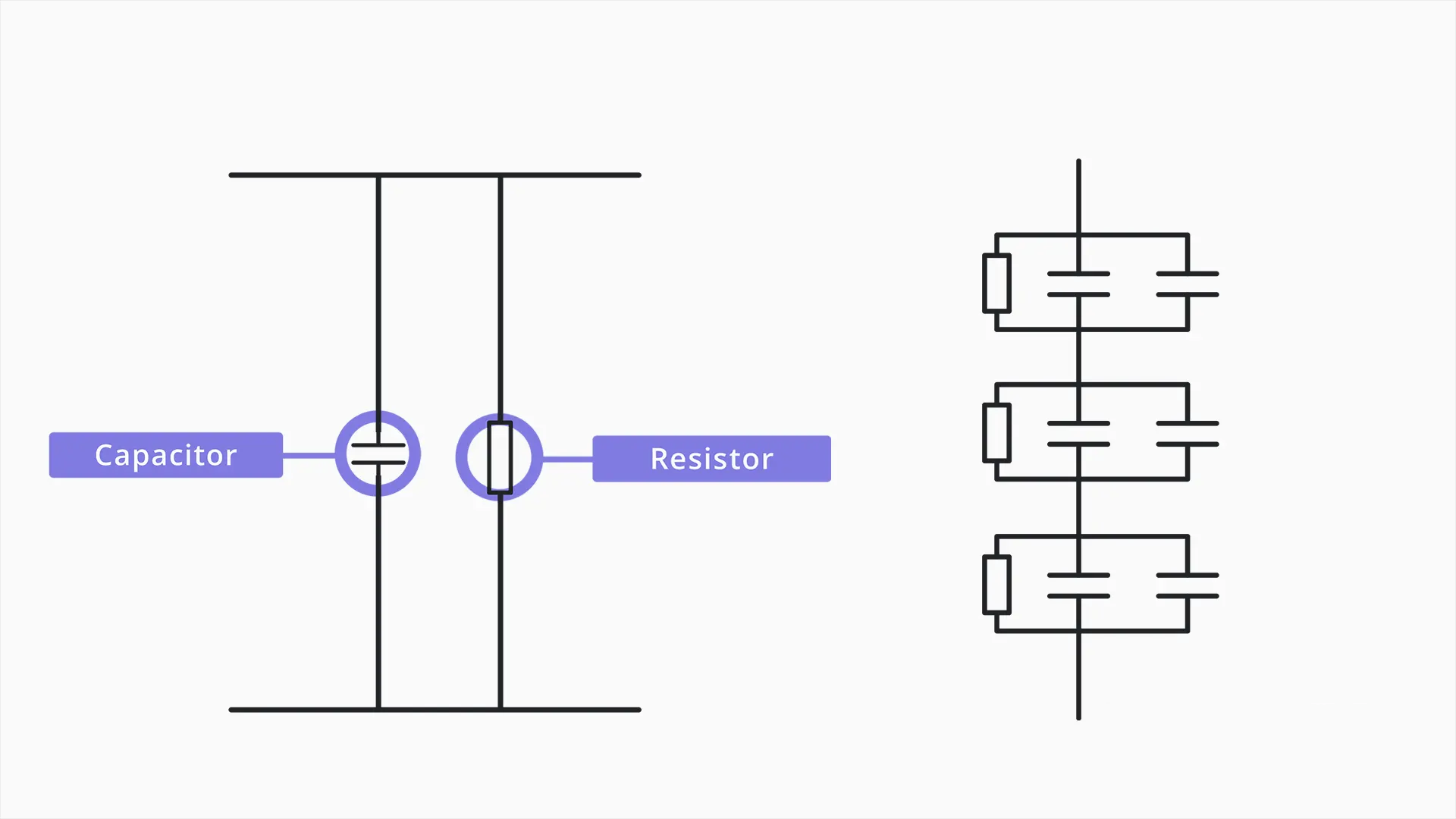
در ادامهی تحلیل دیاگرام VFD، فیلتر و بافر DC را داریم که به باس DC نیز معروف است. باس DC تنها با یک خازن و مقاومت در نمودار نشان داده میشود، اما در واقعیت خازنها و مقاومتهای مختلفی به صورت سری و موازی وجود دارد.
شکل 14: شماتیک مربوط به باس DC
تا زمانیکه خازنها شارژ نشوند، امپدانس آنها بسیار کم است. اگر بخواهیم آنها را شارژ کنیم، جریان هجومی اولیه میتواند به دستگاههای برق ورودی یا یکسو کننده/مبدل آسیب برساند البته در صورتی که فیوزهای ورودی، مدار را قطع نکنند.
شکل 15: اثرات جریان هجومی باس DC
بنابراین در عوض، ما یک مدار پیششارژ داریم. مدار پیششارژ یک مدار محدودکننده جریان است که سرعت شارژ شدن خازنهای باس را در هنگام روشن شدن کاهش میدهد.
مدار پیش شارژ نشان داده شده از موارد زیر تشکیل شده است:
- کنتاکت
- مقاومت
- ترموستات
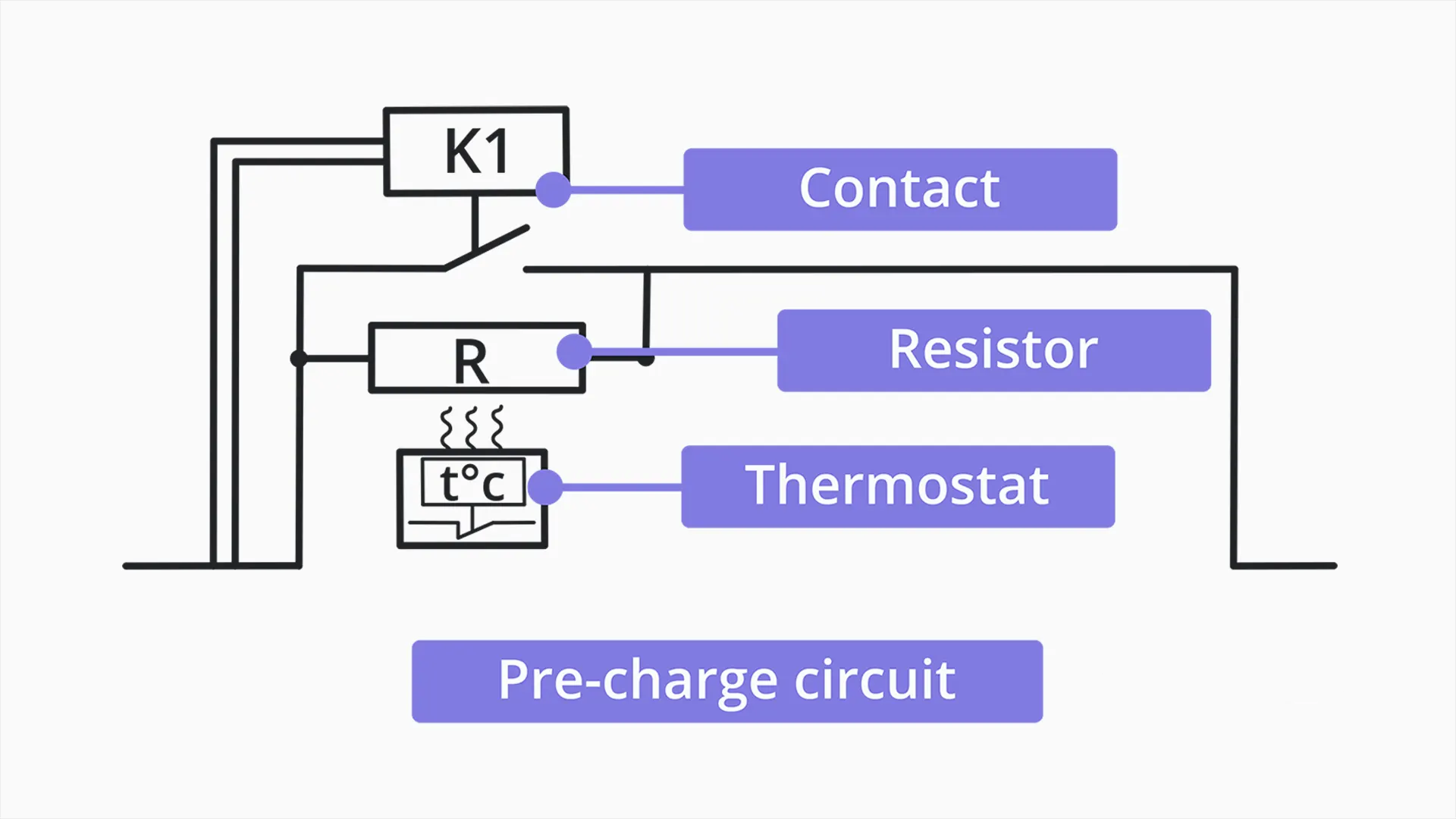
شکل 16: شماتیک مدار پیش شارژ
هنگامی که ما VFD را استارت میزنیم و بانک خازنی هنوز شارژ نشده است، خازنها توسط مقاومتها شروع به شارژ میکنند. زمانی که کنترلهای VFD تشخیص دهند که باس DC کاملاً شارژ شده است، کنتاکت بسته خواهد شد و به مسیری با کمترین مقاومت برای جریان الکتریکی تبدیل میشود.
در حالتی که کنتاکت بسته نمیشود و VFD همچنان موتور را راهاندازی میکند، جریان عبوری از مقاومت افزایش مییابد که باعث گرم شدن بیش از حد مقاومت قبل از شارژ میشود. سپس ترموستات عمل میکند و VFD را به دلیل گرمای بیش از حد غیرفعال میکند.
حال اگر باس DC را مورد بررسی قرار دهیم متوجه خواهیم شد که وظیفهی اصلی مقاومت آن تقسیم ولتاژ است و تضمین میکند که همه خازنها ولتاژ یکسانی خواهند داشت.
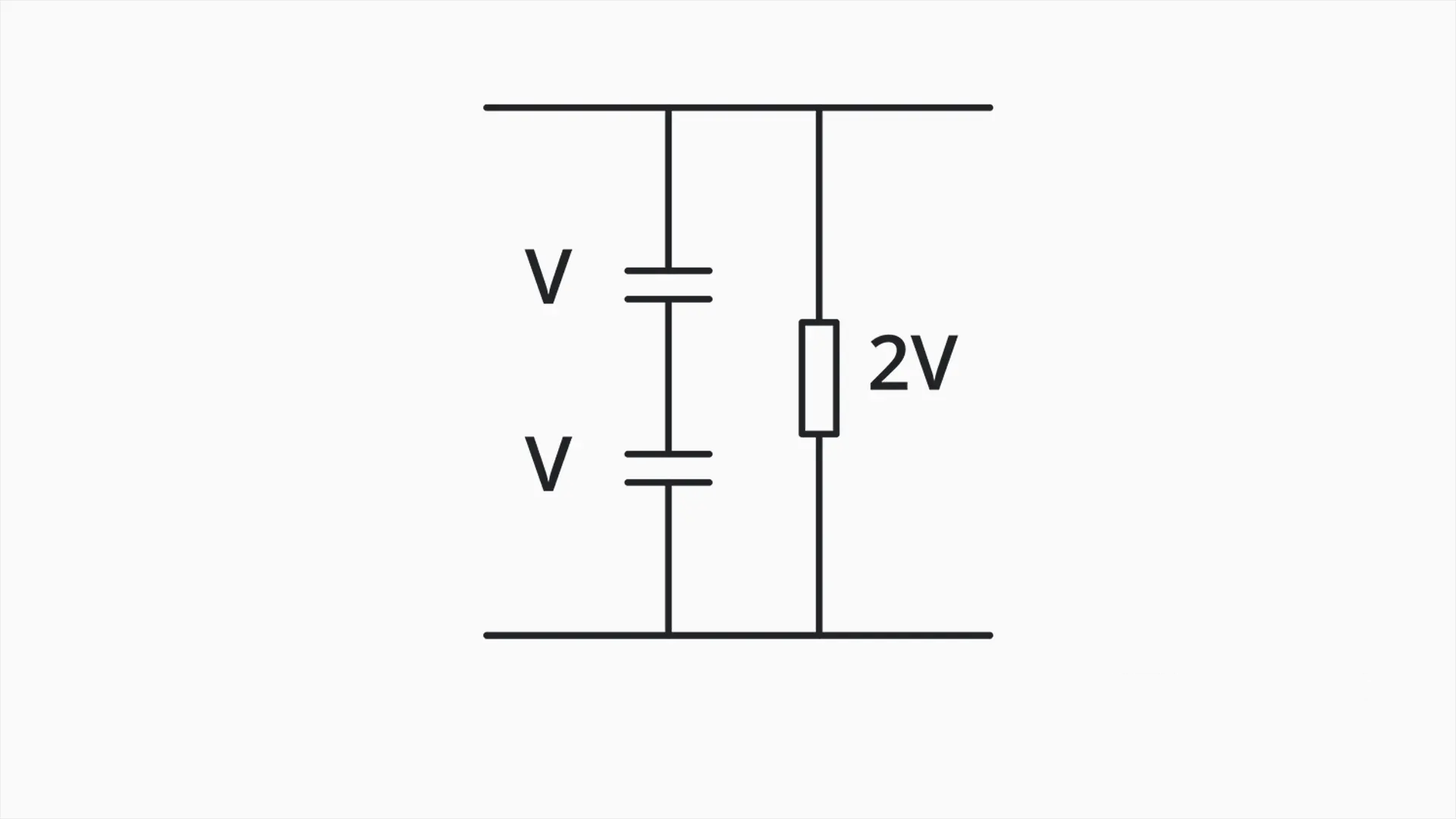
شکل 17:اثر مقاومتها بر ولتاژ خازنها
3. IGBT
در ادامه تحلیل مدار IGBT، VFD ها را خواهیم داشت که آخرین بخش مربوط به خروجی VFD میباشد.
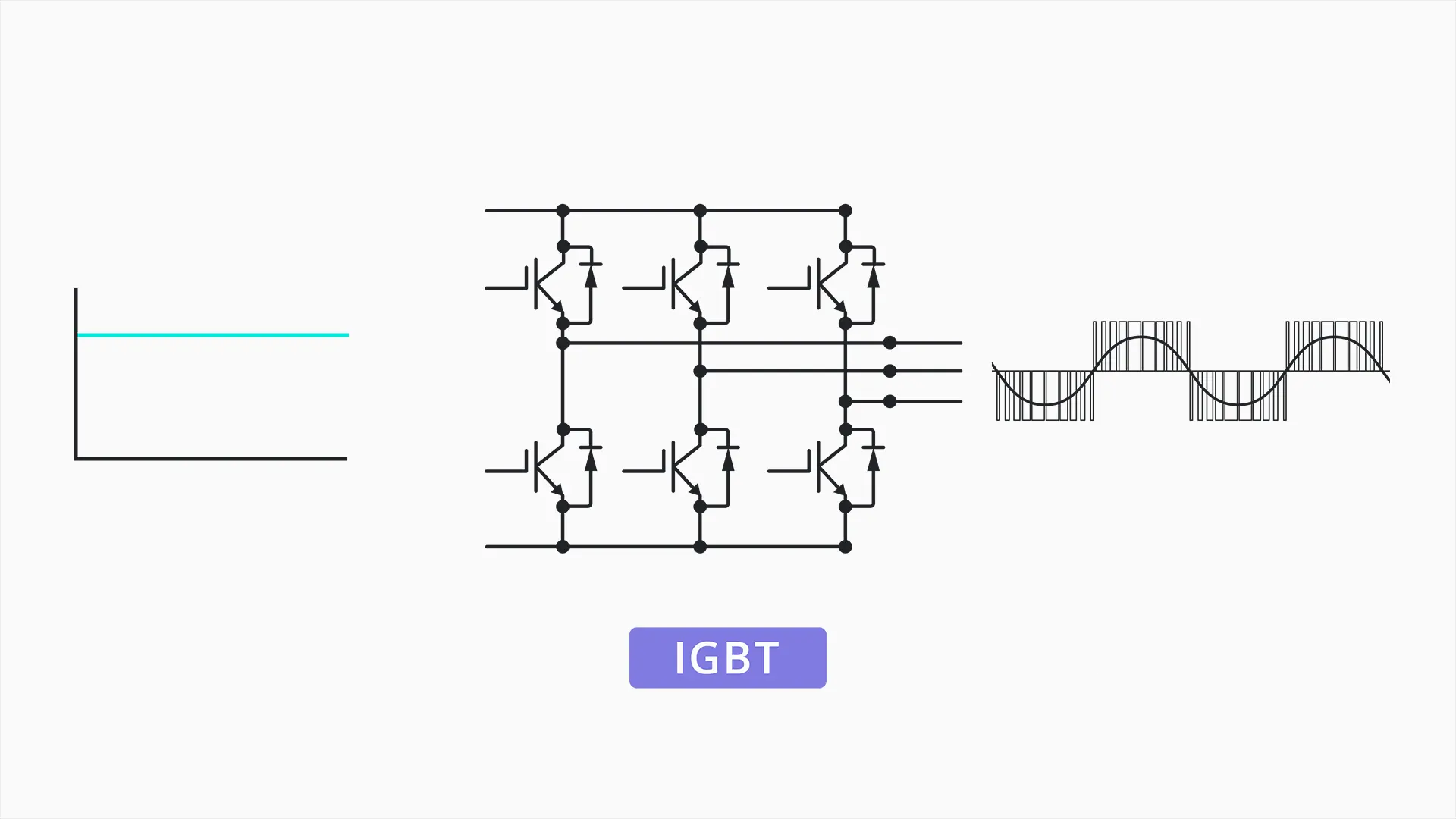
شکل 18: شماتیک IGBT ها در خروجی VFD
ما میدانیم که این آخرین مرحله، جریان مستقیم (DC) را به جریان متناوب (AC) مدوله شده با عرض پالس (PWM) تبدیل میکند. اما PWM به چه معنا است؟ و از همه مهمتر، چگونه این اتفاق میافتد؟
نمیتوان در مورد VFDها و IGBT ها صحبت کرد بدون اینکه اشارهای به مفاهیم مدولاسیون عرض پالس (PWM) نشود. یک سیگنال ورودی آنالوگ را میتوان با تولید پالسهای عرض متغیر برای نمایش دامنه و فرکانس آن مدوله کرد. به زبانی سادهتر، PWM روشی برای تولید سیگنالهای آنالوگ با خروجی دیجیتال است.
شکل 19: تولید سیگنالهای آنالوگ با خروجی دیجیتال
به منظور درک عملکرد IGBT در VFD، لازم است که درک درستی از رفتار یک IGBT به صورت مجزا داشته باشیم.
IGBT به چه شکلی کار میکند؟
به زبانی ساده، یک ترانزیستور دوقطبی با گیت عایق یا همان IGBT، کلیدی است که اجازه عبور جریان برق در یک مسیر مشخص را بسته به ولتاژ اعمالی به گیت آن تعیین میکند.
البته لازم به ذکر است که این کلید قابلیت روشن و خاموش شدن چندین هزار بار در ثانیه را دارد!
IGBT یک نیمه هادی بوده و هیچ بخش متحرکی ندارد. که در آن به جای باز و بسته شدن یک اتصال فیزیکی، با اعمال ولتاژ به یکی از اجزاء نیمه هادی به نام گیت، رفتار ترانزیستور را برای ایجاد یا مسدود کردن یک مسیر الکتریکی تعیین میکند.
بیایید یک IGBT را به صورت واقعیتر بررسی نماییم: پایانهها (پینها) نشاندهنده گیت (Gate)، کلکتور (Collector) و امیتر (Emitter) هستند.
همانطور که نشان داده شد مسیر جریان در امتداد مسیر رسانایی تشکیل شده توسط کلکتور و امیتر ایجاد میگردد، در حالی که گیت مسیر جریان از کلکتور به امیتر را کنترل میکند.
در اینجا هم باز جاری شدن جریان در IGBT به شکل مداری نشان داده شده است.
در کل IGBT مانند یک کلید عمل میکند.
- هنگامی که یک ولتاژ مثبت به گیت اعمال میشود، کلید بسته میشود (روشن میشود) و جریان از کلکتور به امیتر جاری میگردد.
- اگر هم ولتاژ کافی به گیت اعمال نشود، کلید باز (خاموش) میماند و اجازه نمیدهد هیچ جریانی بین کلکتور و امیتر جاری گردد.
به منظور جلوگیری از بسته شدن کلید، در حالت خاموش ولتاژ منفی اعمال میگردد.
برقیار مشاور شما در حوزه اتوماسیون صنعتی
شکل موج PWM
اکنون که درک درستی از نحوه کار IGBTها داریم، اجازه دهید به کاربرد IGBTها در VFDها برگردیم و برای درک سادهتر، IGBTها را به عنوان کلیدهایی نشان دهیم.
IGBTهای بالایی که در نمایش ما به شکل کلیدهایی هستند در قسمت مثبت باس DC و پایینترها در قسمت منفی باس DC قرار دارند، بنابراین وقتی یکی از کلیدهای بالایی بسته میشود، فاز و ولتاژ مصرفکننده مثبت میشود. از طرف دیگر، وقتی یکی از کلیدهای پایینی بسته میشود، آن فاز و ولتاژ مصرفکننده منفی میشود.
بنابراین، با کنترل سرعت و توالی باز و بسته شدن کلیدها، میتوانیم فازها و فرکانس سیگنال خروجی VFD را کنترل کنیم.
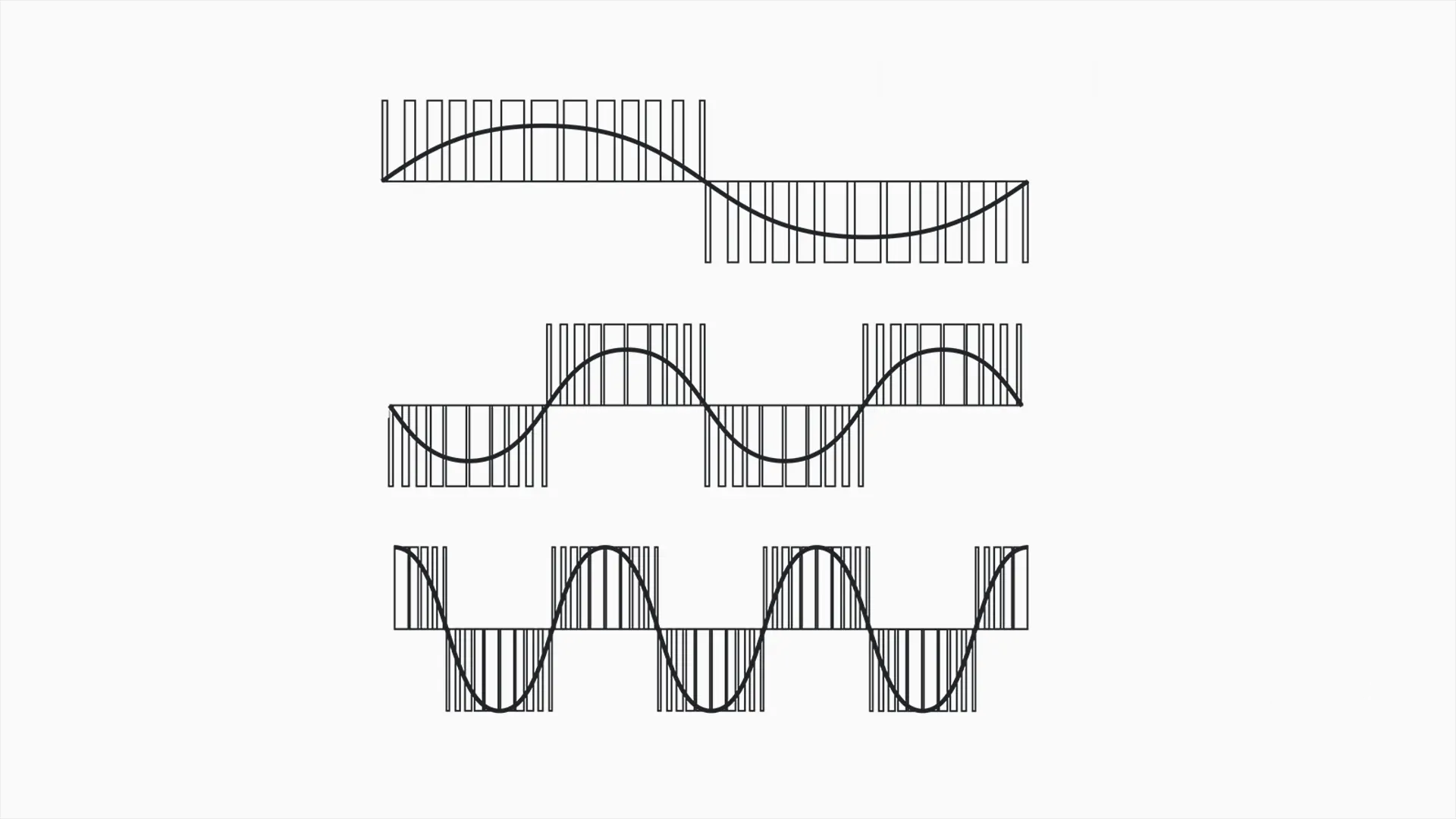
توجه به این نکته مهم است که سیگنال خروجی VFD یک سیگنال PWM است که این شکل موج در عملکرد یک VFD بسیار مهم است، زیرا این ولتاژ و فرکانس متغیر است که VFD را قادر میسازد تا سرعت موتور را کنترل کند.
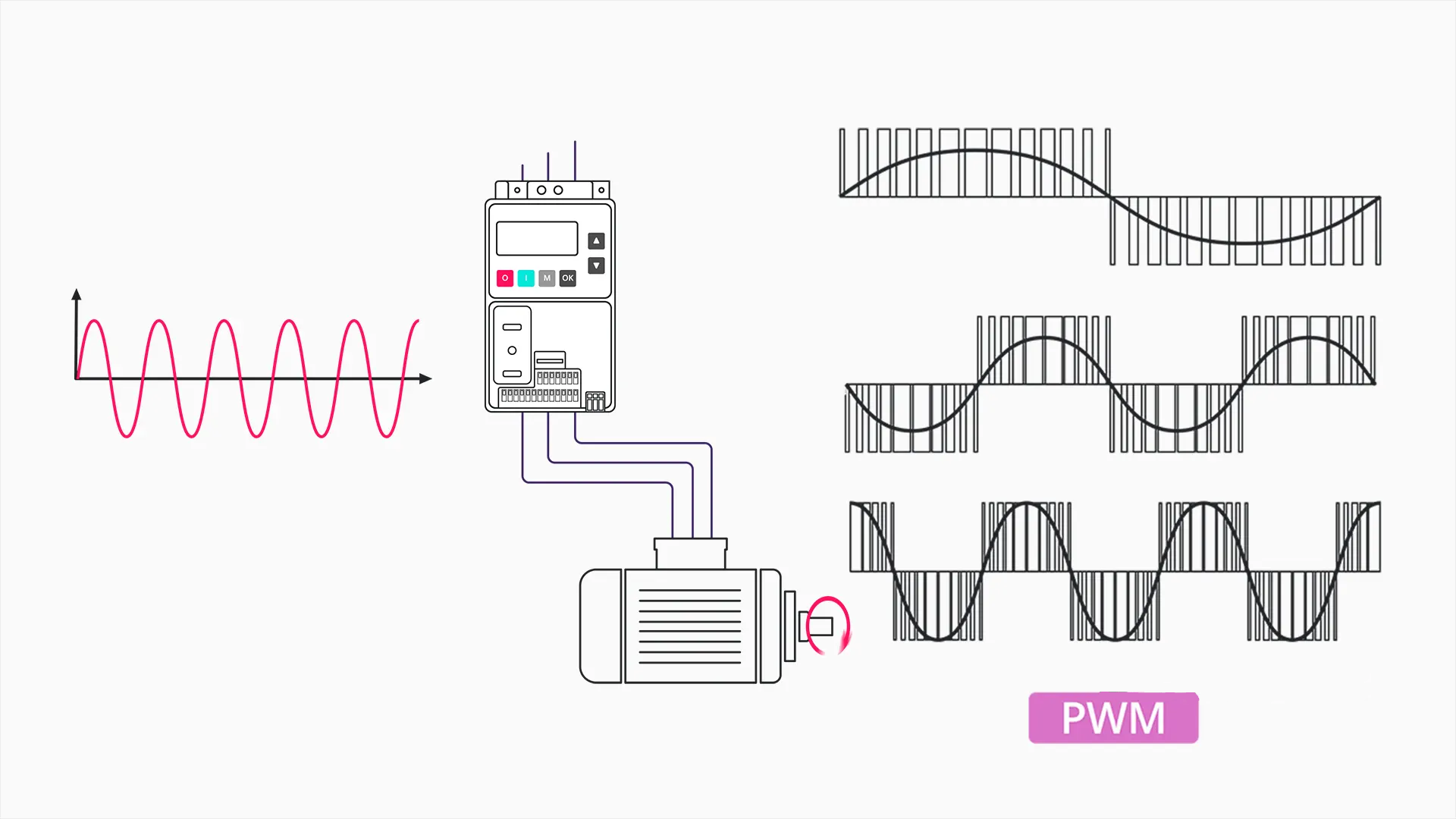
شکل 20: شکل موج PWM برای کنترل موتورهای الکتریکی
برنامه پردازشگر کنترل VFD
پردازنده کنترل یک VFD حاوی برنامهای است که معمولاً برای کاربر قابل دسترس نخواهد بود، با این حال، پارامترها و تنظیمات زیادی وجود دارد که میتوانند برای عملکرد بهینه VFD متناسب با کاربرد موتور، مشخصات موتور و تجهیزات محرک تنظیم شوند.
پارامترها و تنظیمات متداول در VFD به شرح زیر است:
- کنترل کننده PID قابل تنظیم
- حداقل و حداکثر سرعت مورد نیاز
- محدود نمودن جریان و ...
تعداد این پارامترها بر اساس سطح پیچیدگی VFD متفاوت است اما می توانند از 50 تا بیش از 200 پارامتر متغیر باشند!
خلاصه
VFDها امکان کنترل دقیق سرعت موتور را با تغییر فرکانس و ولتاژ منبع تغذیه آن فراهم میکنند. دامنه کاربرد VFDها هم وسیع بوده تا جایی که از موتورهای کوچک گرفته تا کمپرسورهای بزرگ را میتوان با VFDها کنترل نمود. وظیفهی اصلی VFDها کنترل سرعت و گشتاور موتور برای برآوردن نیازهای کاربردی بوده و این کار هم با تغییر ولتاژ و فرکانس منبع تغذیه صورت میگیرد.
یک کنترلر VFD از چندین بخش تشکیل میشود:
- بخش ورودی درایو که جریان متناوب از این بخش وارد اینورتر میشود.
- بخش حفاظتی که شامل ترانسفورماتورهای جریان ورودی و خروجی VFD به منظور تشخیص خطاهای زمین میباشد. همچنین مدارات پیش شارژ که از جریانهای هجومی اولیه جلوگیری میکند هم زیر مجموعهی این بخش میباشند.
- جریان متناوب توسط یکسوکننده یا مبدل شش پالس به جریان مستقیم تبدیل میشود.
- این جریان مستقیم در باس DC فیلتر و بافر میشود، جایی که عملکرد مقاومتهای آن تقسیم ولتاژ بوده و تضمین میکند که همه خازنها ولتاژ یکسانی خواهند داشت.
- این جریان مستقیم فیلتر شده میتواند یک بار دیگر توسط IGBTها که مشابه کلیدها عمل میکنند به جریان متناوب تبدیل شود که امکان کنترل فازها و فرکانس سیگنال را در قالب خروجی PWM فراهم میکند.
- خروجی PWM امکان کنترل سرعت و گشتاور موتور را فراهم میکند.
در نهایت استفاده از VFDها فرآیندهای عملیاتی را روانتر، بادوامتر و بسیار کارآمدتر خواهد نمود.
منبع:
REALPARS
دیدگاه خود را بنویسید